☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Sexta Clase
Sexta Clase
Diapositiva 1 - .: Docencia FCA-UNAM
Diapositiva 1
II CURSO BASICO DE CIRUGIA LAPAROSCOPICA
Diapositiva 1
Diapositiva 1
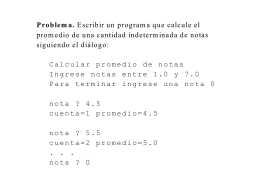
88673_2EstructurasdeControlC
DIRECCION GENERAL DE IMPUESTOS INTERNOS MINISTERIO
Información en Power Point
Diapositiva 1
Case - WordPress.com
HERRAMIENTAS CASE
Diapositiva 1
Presentación de PowerPoint
Action Script 3.0
Sin título de diapositiva
INTRODUCCION AL LENGUAJE C
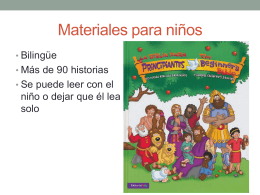
Materiales para niños
PPT - cannes
PROYECTO CON EL MICROCONTROLADOR PIC 16F84A
Diapositiva 1
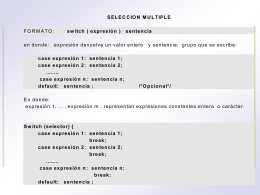
Estructuras Case (Switch)