☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Búsqueda con retroceso
Recopilación de datos cuantitativos.
Descargar guia clase 4 - Corte Suprema de Justicia de la Nación
El Peligro de una falsa seguridad
Bases fisiológicas del amor 13.4.
guia de ana frank
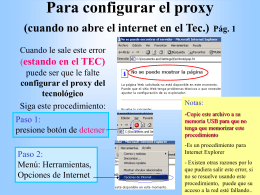
Para configurar el proxy (cuando no abre el internet) 1
San Manuel Bueno, mártir