☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Document
Document
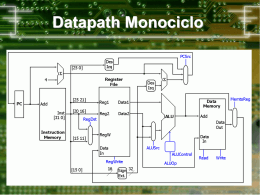
Arquitectura de Computadores I
ARQUITECTURA DE COMPUTADORAS.
Arquitectura Harvard
Características generales de 802.15.4 Entre las
FORMATO ARCHIVOS
La imagen digital 1
Radar de Detección
Componentes de un ordenador
ARQUICTECTURA DE COMPUTADORAS
Diseño y descripción de una unidad de control para una red de
Transmisión Asíncrona
Arquitectura de Computadores I
Arquitectura de Computadores I
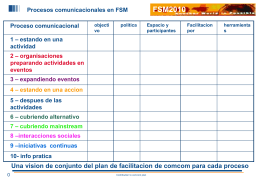
Procesos comunicacionales en FSM Espacio abierto