☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
Ingeniería
Document
Sistemas de Ecuaciones Lineales
2. Determinantes
sistemas de ecuaciones
Unidad 9: Derivadas
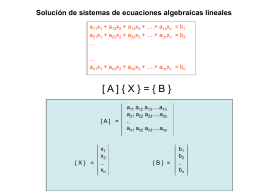
Solución de sistemas de ecuaciones algebraicas lineales
Slide 1
Descarga - tecnisys
MY VISSION
algoritmo de factorización directa con pivoteo maximo de columna
Una bonita contradicción
Presentación de Bruno Zazo en FICOD
Diapositiva 1
family
No Slide Title