☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Fluids at Rest
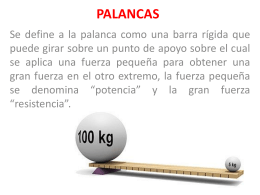
Transmisión lineal: PALANCA
Polea fija
PALANCAS - WordPress.com
MOMENTO DE TORSIÓN Y EQUILIBRIO ROTACIONAL.
Momento de Torsión (TORCA) y Equilibrio Rotacional
Presentación de PowerPoint
COMERCIO ELECTRÓNICO: UNA BREVE HISTORIA
Maquinas Simples - sciencesaintpaul
Mecanismos Simples[1]. - educacion-tecnologica
palanca - WordPress.com

![Mecanismos Simples[1]. - educacion-tecnologica](http://s1.slideshowes.com/store/data/000030321_1-741c5fb1bc7017d9fae49ce0796df2c2-260x520.png)
