☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
Sistemas de Ecuaciones Diferenciales Lineales
resolución de ejercicios
MÁQUINAS. CONCEPTOS
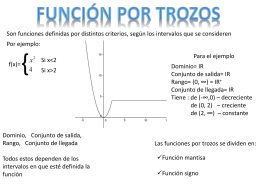
Función por trozos
Métodos de Integración
FUERZAS Y EQUILIBRIO DE UNA PARTICULA
ITERACIÓN SIMPLE DE PUNTO FIJO
x - Inicio
Presentación de Flujo Eléctrico en
PROBLEMA GENERAL DE LAS TRAYECTORIAS
no homogenea. - utp-ing.industrial iii