☰
Explorar
Iniciar sesión
Crear una nueva cuenta
Pubblicare
×
Descargar
No category
CONTROL Y SUPERVISIÓN DE LA POSICIÓN ANGULAR DE UN
Presentación de PowerPoint
MECANISMOS
MECANISMOS - Grupotecno’s Weblog
MECANISMOS
4. AFILIACIÓN A CÁMARAS
Confianzas o sospechas. Sobre las posibilidades de aprender en la
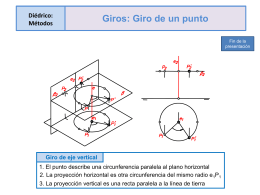
1- Diédrico Métodos: GIROS
MOVIMIENTO CIRCULAR
Sin título de diapositiva
TRANSFORMACIONES LINEALES EN 3D